Bestätigung der Brenner-/Armposition
-
Industriebereich:
- Automobilindustrie
-
Produkte:
- Sensoren
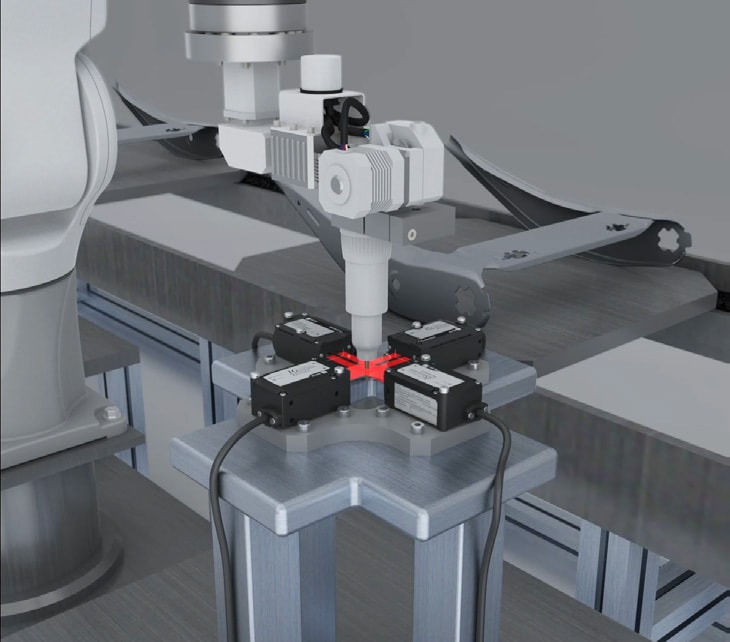
Durch die Überwachung der Positionsabweichung der Spitze des Brennerarms ist es möglich, Defekte zu vermeiden, die durch Verformung der Spitze verursacht werden, wie z. B. eine Abweichung der Schweißnaht aufgrund der Schweißbrennerposition. Eine Verformung tritt auf, weil die Spitze des Brennerarms belastet wird, wenn der Roboter in Betrieb ist. Aus diesem Grund müssen Sensoren in der Standby-Position des Roboters installiert werden, um zu prüfen, ob Abweichungen in der X-, Y- und Z-Richtung vorliegen. Diese können mit dem menschlichen Auge nicht wahrgenommen werden, da sich automatisierte Maschinen ständig bewegen. Wenn die Bearbeitung oder Montage bei verformter Armspitze durchgeführt wird, besteht außerdem die Gefahr der Massenproduktion defekter Produkte.
