EtherCAT®
Wichtige Punkte im Überblick
- EtherCAT® ist ein Ethernet-basiertes Echtzeitnetzwerk, das durch das On-the-Fly-Verfahren eine besonders hohe Effizienz erreicht.
- Unterstützt nahezu alle Topologievarianten, wie Linie, Baum oder Stern (bis zu 65535 Teilnehmer sind möglich).
- PDO Mapping mit deterministischen Antwortzeiten im Master-Slave-Prinzip.
- Zeitsynchronisation durch Distributed Clocks mit Jitter ≤ 1 µs – ideal für Motion-Control-Anwendungen.
- Azyklische Kommunikation über Mailbox-Protokolle wie CoE, EoE und FoE für verschiedenste Anwendungen.
Übersicht
EtherCAT® ist ein Ethernet-basiertes, offenes Echtzeitnetzwerk, das ursprünglich von der Firma Beckhoff Automation GmbH entwickelt wurde. Heute wird es von der EtherCAT® Technology Group (ETG) verwaltet und weiterentwickelt.
EtherCAT® zeichnet sich durch die hohe Kommunikationsgeschwindigkeit aus.
Das Netzwerk eignet sich auch für Motion-Control-Anwendungen, da alle Teilnehmer mithilfe der Distributed Clocks präzise synchronisiert werden. Diese Funktion gleicht Verzögerungen aus, die durch die Übertragungszeit entstehen.
Netzwerktopologie und Kommunikationsprotokoll
Netzwerktopologie
EtherCAT® ist ein Ethernet-basiertes Kommunikationssystem. Es werden nahezu alle Topologievarianten, wie Linie, Baum oder Stern unterstützt. Darüber hinaus können bis zu 65.535 Teilnehmer angeschlossen werden.
Kommunikationsprotokoll
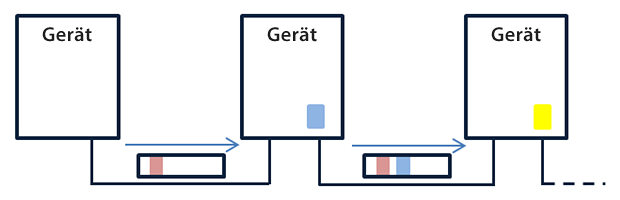
Das vom EtherCAT® Teilnehmer gesendete Telegramm durchläuft alle Teilnehmer. Die einzelnen Teilnehmer lesen die zugewiesenen Ausgangsdaten "on the fly" und schreiben die Eingangsdaten gleichzeitig in den dafür vorgesehenen Frame. Vom letzten Teilnehmer aus wird das Telegramm wieder zum Master gesendet.
Kommunikationsarten
EtherCAT® verwendet zwei Kommunikationsarten: Zyklische Kommunikation und azyklische Kommunikation. Die zyklische Kommunikation dient dem regelmäßigen Austausch von Prozessdaten in festen Zyklen. Azyklische Kommunikation (Mailbox-Protokolle) ist darüber hinaus für den Austausch von Parametern oder Nachrichten zu beliebigen Zeitpunkten geeignet.
Zyklische Kommunikation - Prozessdatenobjekte (PDO)
Die zyklische Kommunikation ist eine Kommunikationsfunktion von EtherCAT®. Sie ermöglicht den gleichzeitigen Austausch von Prozessdaten mit allen Teilnehmern in einem festen Zyklus. Dieser Zyklus wird von allen Geräten gemeinsam genutzt und sorgt für deterministische Kommunikation.
EtherCAT® arbeitet nach dem Master-Slave-Prinzip, wobei der Master die Zykluszeit und die Konfiguration vorgibt. Für jedes Gerät wird ein definierter Datenbereich innerhalb des Ethernet-Telegramms reserviert. Dadurch können die Daten effizient übertragen werden, ohne dass für jedes Gerät separate Telegramme erforderlich sind.
Synchronisierung mit Distributed Clocks
Mithilfe der Distributed Clocks wird eine hochgenaue Synchronisierung aller Teilnehmer sichergestellt. Der Abgleich der Uhren in den Teilnehmern erfolgt vollständig in der Hardware. Hierfür wird die Uhrzeit des ersten synchron arbeitenden Teilnehmers zyklisch an alle anderen Uhren im System verteilt. Alle Teilnehmer können sich dadurch exakt auf diese Referenzuhr einregeln. Der resultierende Jitter im System ist kleiner als 1 μs.
Azyklische Kommunikation - Mailbox-Protokolle
Die azyklische Kommunikation wird mithilfe von Mailbox-Protokollen umgesetzt. Je nach Anwendung gibt es hierfür verschiedene Protokolle, wie beispielsweise Ethernet over Ethercat (EoE) oder File access over Ethercat (FoE).
Mit Ethernet over EtherCAT (EoE) kann beliebiger Ethernet-Datenverkehr im EtherCAT-Segment transportiert werden.
Mit File access over Ethercat (FoE) kann auf Dateien zugegriffen werden, um beispielsweise einheitliche Firmware-Uploads zu anzustoßen.


