Industrielle Bildverarbeitung
Kamerageführte Robotik
Wichtige Punkte im Überblick
- Mit kamerageführter Robotik (Robot Vision) werden zeitaufwändige manuelle Tätigkeiten wie Rüstzeiten und Kalibrierung eliminiert, wodurch sich die Produktionseffizienz steigert.
- Die automatische Kalibrierung der KEYENCE-Roboteranlagen erfolgt einfach per Knopfdruck, wodurch manuelle Eingriffe und Genauigkeitsschwankungen zwischen Bedienern entfallen.
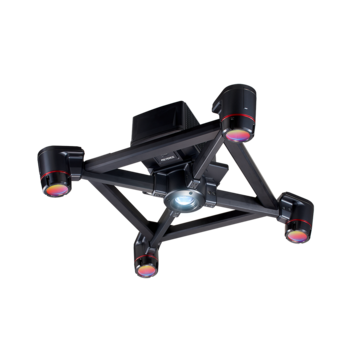
- Das 3D Robot Vision-System CV-X480D verwendet vier Kameras für eine kollisionsfreie, zuverlässige Objektsuche und Positionierung in tiefen Behältern ohne tote Winkel.
- Bildverarbeitungssysteme bieten wesentliche Vorteile, wie eine verbesserte Genauigkeit, eine höhere Vielseitigkeit und eine bessere Anpassungsfähigkeit. Sie sind ideal für die Qualitätskontrolle und Sicherheit, da sie sich an Umgebungsveränderungen anpassen lassen.
Die Einführung von Industrierobotern führte zu einer Beschleunigung der Produktion und zur Automatisierung vieler manueller Arbeitsschritte. Trotzdem blieben Arbeiten wie Werkzeugwechsel, Kalibrierung und Tests zeitaufwändig und verursachten Produktionsunterbrechungen, da diese Aufgaben manuell erledigt werden müssen.
Kamerageführte Robotik (Robot Vision) und entsprechende Bildverarbeitungstechnologien schließen genau diese Lücke. Sie reduzieren manuelle Eingriffe, verkürzen Rüstzeiten und ermöglichen eine flexiblere sowie kontinuierlichere Fertigung. Sie gelten als Ansatz, um zeitaufwändige Arbeiten, die bislang als unvermeidbar galten, überflüssig zu machen. Auf der folgenden Seite werden die Grundlagen der kamerageführten Robotik vorgestellt und was bei ihrer Implementierung zu beachten ist.
- Kalibrierungsprobleme
- Verbindungsprobleme zwischen Industrierobotern und Bildverarbeitungssystemen
- Anforderungen an die Weiterbildung von Mitarbeitern

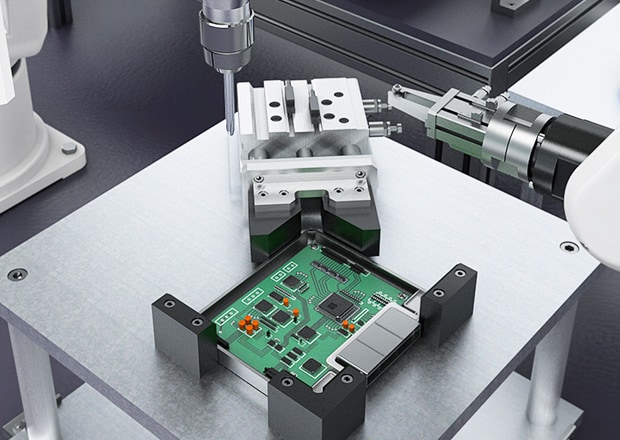
Aufnehmen und Ablegen

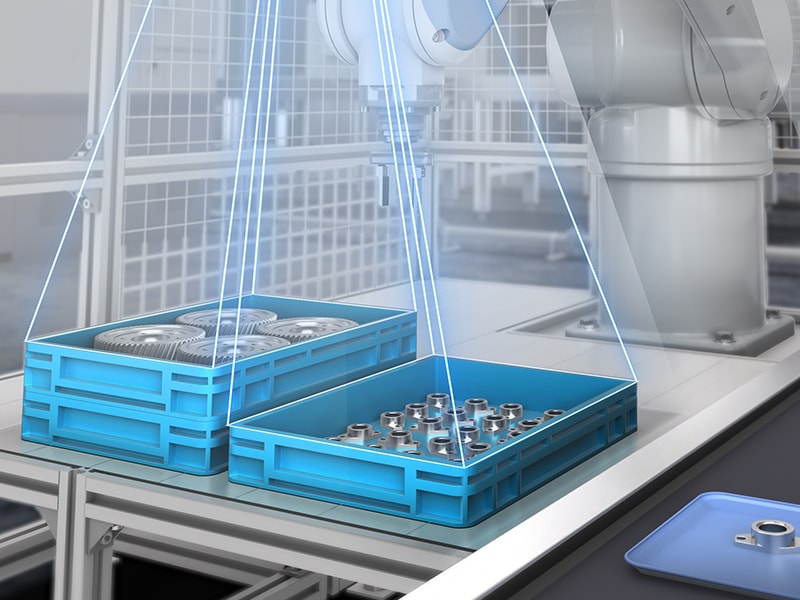
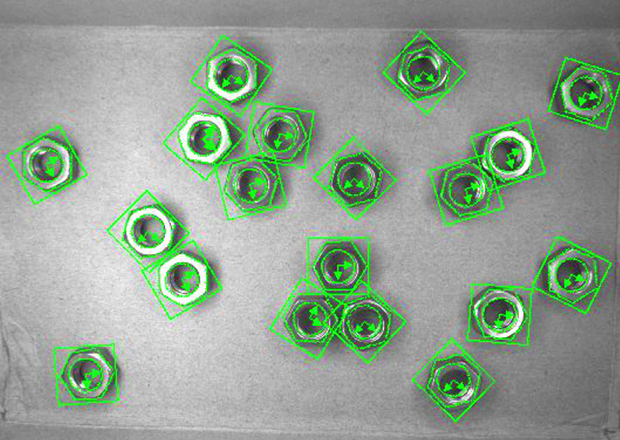
Bin Picking

Positionierung an einem Bestückungsroboter von Pralinenschachteln
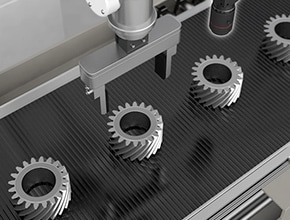
Aufnehmen durch den Roboter
Praktische Anwendungen

Automatische Kalibrierung
Bislang musste der Bediener eines Industrieroboters die Koordinaten manuell über ein Teachpanel eingeben. Eine Neuanpassung war jedes Mal erforderlich, wenn sich das Objekt oder das Werkzeug änderte, auch schwankte die Genauigkeit je nach Mitarbeiter. Bildgestützte Roboteranlagen mit automatischer Kalibrierung werden einfach per Knopfdruck und ohne manuellen Eingriff kalibriert. An den bildgestützten Roboteranlagen von KEYENCE wurden zeitaufwändige Tätigkeiten wie Kalibrierung und Berechnung automatisiert.
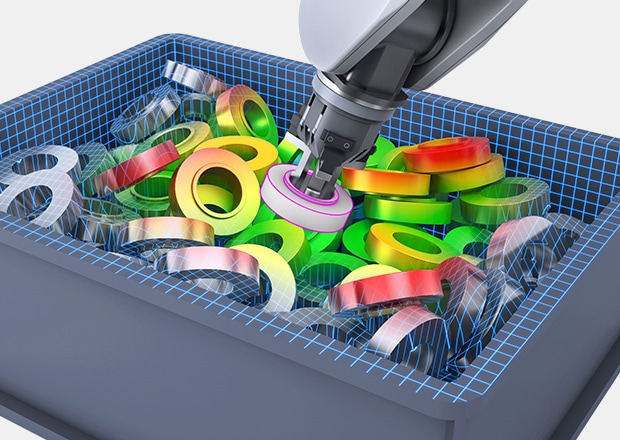
Bin Picking
3D Robot Vision kann verstreut liegende Teile erkennen und sogar eine zufällige Kommissionierung durchführen. Dies ist eine effiziente Methode, da sie das mühsame Ausrichten der Objekte durch einen Bediener eliminiert. Gleichzeitig wird die Anzahl der Peripheriegeräte minimiert, was eine hohe Flexibilität bietet. Wir schlagen Ihnen den optimalen Weg für die Installation von 3D Robot Vision und Ihren Weg in die Industrie 4.0 vor.
Entlastung des Bedieners
Bei der manuellen Kommissionierung können große und schwere Objekte für die Bediener sehr belastend sein. Es gibt auch Situationen, in denen zwei, drei oder mehr Bediener ein einziges Objekt handhaben müssen. Roboter können Objekte sicher, zuverlässig und flexibel greifen und entnehmen, auch wenn diese groß oder schwer sind. Das ist Industrie 4.0 im Einsatz.
Zuverlässiges Anfahren von Objekten
Das 3D Robot Vision-System CV-X480D kann nach Objekten suchen, ohne durch Richtungsabhängigkeit oder tote Winkel beeinträchtigt zu werden. Die neu entwickelte 3D-Suchfunktion verwendet vier separate Kameras, um ein 3D-Bild ohne tote Winkel zu erzeugen und so optimale Erkennungsergebnisse zu erzielen. Sie bestimmt auch die Position und Ausrichtung des Objekts und ermöglicht so eine stabile Suche. Das System sorgt für ein vollständig kollisionsfreies Aufnehmen der Objekte, selbst wenn sie sich in einem tiefen Behälter befinden.
FAQs zur kamerageführten Robotik
Welche Vorteile bietet der Einsatz von Bildverarbeitungssystemen für die Roboterführung?
Zu den Vorteilen eines Bildverarbeitungssystems für die Roboterführung gehören:
- Verbesserte Genauigkeit und Präzision
- Höhere Vielseitigkeit
- Bessere Anpassungsfähigkeit an Veränderungen in der Umgebung
- Verbesserte Objekterkennung
- Reduzierte Produktschäden
- Verbesserte Sicherheit
Welche Arten von Bildverarbeitungssystemen werden in der Robotik-Industrie häufig verwendet?
Bildverarbeitungssysteme für die Robotik-Industrie nutzen eine Vielzahl von Bildgebungstechnologien sowie fortschrittliche Algorithmen für künstliche Intelligenz und maschinelles Lernen. Dazu gehören 2D- und 3D-Scanner und Kamerasysteme sowie zahlreiche Sensoren zur Erfassung von Umgebungs- und Zielinformationen.
Bei welchen Herausforderungen helfen Bildverarbeitungssysteme in der Robotik-Industrie?
Bildverarbeitungssysteme für die Robotik-Industrie helfen bei der Bewältigung verschiedener Herausforderungen, insbesondere im Bereich Objekterkennung und -klassifikation, räumliche Navigation und Hindernisvermeidung, Präzision und Genauigkeit bei der Aufgabenausführung sowie Anpassungsfähigkeit an variable Aufgaben und Umweltveränderungen – diese Eigenschaften machen Bildverarbeitungssysteme ideal für die Qualitätskontrolle.
Wie unterstützen Bildverarbeitungssysteme die Rückverfolgbarkeit und die Einhaltung von Vorschriften in der Robotik-Industrie?
Viele Branchen, darunter Fertigung und Handel, sind auf Produktverfolgbarkeit für Logistik- und Compliance-Zwecke angewiesen. Bildverarbeitungssysteme, die mit Pick-and-Place-Robotern verbunden sind, können Komponenten, Produkte und Prozesse verfolgen und so sicherstellen, dass die betrieblichen Aktivitäten den erforderlichen Standards entsprechen.
Was sind die wichtigsten Überlegungen bei der Auswahl von Bildverarbeitungssystemen für die Robotik-Industrie?
Die Auswahl eines geeigneten Bildverarbeitungssystems für Ihre spezifische Anwendung hängt von verschiedenen Faktoren ab, darunter Auflösung und Bildqualität, Verarbeitungsgeschwindigkeit, Sichtfeld und Tiefenschärfe. Zu den weiteren Faktoren zählen die Integrationsfähigkeit mit Ihrem bestehenden System und natürlich die Kosten.
Welche Schritte sind bei der Implementierung von Bildverarbeitungssystemen für die Robotik erforderlich?
Die Implementierung eines geeigneten Bildverarbeitungssystems beginnt mit der Definition der Anforderungen, gefolgt von der Auswahl des passenden Bildverarbeitungssystems und der Wahl der richtigen Hardware- und Softwarelösungen.
Welche Herausforderungen bewältigt kamerageführte Robotik?
Kamerageführte Robotik bewältigt eine Vielzahl von Herausforderungen im Zusammenhang mit komplexer Objektmanipulation, Navigation in dynamischen Umgebungen, Qualitätskontrolle und Inspektion sowie den Präzisionsanforderungen bei Platzierungs- und Montageaufgaben.
Was sind die Schlüsselelemente eines KEYENCE-Bildverarbeitungssystems für Robotik?
Zu den Schlüsselelementen der KEYENCE-Bildverarbeitungssysteme für Robotik gehören: ein 3D-Vision-gesteuerter Robotik-Controller, eine 3D-Vision-gesteuerte Robotik-Kameraeinheit, eine spezielle 3D-Vision-gesteuerte Robotik-Kamera und Optionen für 2D-Flächenkameras. Alle diese Systeme verwenden eine automatische Kalibrierung zwischen Vision-System und Roboter.
Welche Anwendungen profitieren von einer kamerageführten Robotiklösung?
Welche Anwendungen besonders von kamerageführten Robotiklösungen profitieren, ist branchenspezifisch. So ermöglichen Fertigungs- und Montageindustrien beispielsweise eine präzisere Montage, während die Qualitätskontrolle von automatisierter Fehlererkennung und Maßverifizierung profitiert. Die Einsatzmöglichkeiten sind vielfältig. Grundsätzlich bringt der Einsatz robotergestützter Automatisierung in jeder Branche Vorteile, die durch kamerageführte Robotiklösungen noch weiter gesteigert werden können.