Grundlagen der Positionserkennung
Positionsmessung (Suchmodus)
Eine gängige Anwendung für Bildverarbeitungssysteme ist die Positions-/Winkelmessung.
Für Glassubstrate sind präzisere Positionsdaten erforderlich. Für die Prüfung von ICs benötigt man eine Verarbeitungskapazität, die mit Hochgeschwindigkeitslinien Schritt halten kann. Die Positions-/Winkelmessung wird in der Regel als Funktion zur Positionskorrektur genutzt, um noch vor der in den obigen Themen beschriebenen Flecken- oder Kantenerkennung die Fehlausrichtung eines Messobjekts zu erkennen. Auf dieser Seite wird der am häufigsten verwendete Modus „Mustersuche“ vorgestellt, bevor anhand seines Funktionsprinzips die Methoden für eine stabile Erkennung detailliert erläutert werden.

Algorithmus des Modus „Mustersuche“
Was versteht man unter Mustersuche?
Bei der Mustersuche wird das Gesamtbild nach einem oder mehreren Mustern durchsucht, die einem Referenzbild (Muster) ähnlich sind. Anschließend werden die lokalisierte Position, der Winkel und der Korrelationswert (Übereinstimmungsgrad) ausgegeben.
Der Mustersuche-Modus der Modellreihe CV von KEYENCE funktioniert nach dem folgenden Algorithmus.
Prozess 1Muster- und Suchbild komprimieren, um das Datenvolumen zu verringern.

Fenster mit dem erfassten Bildmuster

Fenster mit dem komprimierten Muster (Abbildung)
Für den Musterabgleich (normalisierte Korrelation) müssen gewaltige Datenmengen verarbeitet werden und die Berechnung sämtlicher Informationen des erfassten Bilds braucht sehr lange. Um die Datenmenge zu verringern und Verarbeitungszeit zu sparen, ist es daher sinnvoll, die in die Berechnung eingehende Pixelanzahl zu begrenzen. Dieser Vorgang wird als Dezimierung oder Komprimierung bezeichnet.
Prozess 2Erste Suche
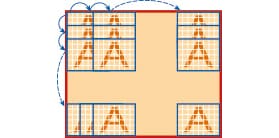
Das Fenster wird in einem bestimmten Intervall innerhalb des Suchbereichs verschoben, um die Position zu finden, an welcher der Korrelationswert am höchsten ist. Dieses Intervall wird als Schrittweite oder „Skip „bezeichnet. Bei aktivierter Drehwinkelkorrektur wird das Fenster um den erforderlichen Winkel gedreht, um so nach der Position zu suchen.
Prozess 3Zweite Suche
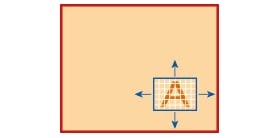
Um die Position aus der ersten Suche herum wird ein kleinerer Bereich nach einem Muster durchsucht, das mit einer geringeren Rate komprimiert wurde, um die Position zu finden, an welcher der Korrelationswert am höchsten ist. * Dieser Vorgang wird gelegentlich mit mehreren geringeren Komprimierungsraten wiederholt.
Prozess 4Abschließende Erkennung

Der Bereich um die in Prozess 3 gefundene Position wird anhand eines nicht komprimierten Musters durchsucht und anschließend eine Subpixelverarbeitung durchgeführt.

Typische Beispiele für eine Prüfung mit dem Suchmodus
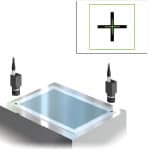
Positionierung von Glassubstraten
Vor dem Laminieren von Glassubstraten wird die Position der Markierungen an den diagonalen Punkten der Substrate auf korrekte Ausrichtung geprüft.
Prüfung auf schiefe Flaschen-Etiketten
Auf Flaschen aufgeklebte Etiketten werden auf Fehlausrichtung überprüft. Da selbst bei Hochgeschwindigkeitslinien eine 100-prozentige Prüfung möglich ist, wird so verhindert, dass defekte Werkstücke in den nächsten Prozess gelangen.

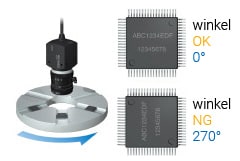
Überprüfung der Ausrichtung von ICs
Aufgrund des Winkels, der über eine Suche nach den Markierungen an den ICs ermittelt wird, lässt sich die Ausrichtung der ICs auf einem Indextisch feststellen. Dafür benötigt man eine Verarbeitungskapazität, die mit Hochgeschwindigkeitslinien mithalten kann.
Wie man Fehler bei der Suche wirksam verhindert
Gründe für Fehler bei der Suche
Wie im Abschnitt über den Algorithmus ausgeführt, wird in der ersten Suche die ungefähre Position ermittelt, wobei im Sinne kürzerer Verarbeitungszeiten ein komprimiertes Bild des Referenzmusters verwendet wird.

Der Hauptgrund für eine fehlerhafte Mustererkennung besteht darin, dass bei Verwendung eines komprimierten Bilds ein Muster, das nicht erkannt werden sollte (Kandidat 2 in der Abbildung unten), in der ersten Suche fälschlicherweise als Kandidat ausgemacht wird.

Wie man Fehler bei der Suche wirksam verhindert (Ändern der Komprimierungsrate)
Mit der Modellreihe CV von KEYENCE können Sie verschiedene Suchparameter definieren (z. B. die Komprimierungsrate), wofür früher Expertenwissen erforderlich war, indem Sie eine Gruppe von Elementen auswählen, die für den jeweiligen Einsatzzweck vordefiniert wurden. Die Komprimierungsrate wird über den Parameter „Suchempfindlichkeit“ definiert. Sie können zwischen sieben Stufen von niedrig bis hoch wählen.

Suchempfindlichkeit „Hoch“
Suchempfindlichkeit „Niedrig“
Im Klemmenbeispiel stimmt das Bild je nach gewählter Suchempfindlichkeit (Komprimierungsrate) mit dem auf der rechten Seite überein. Durch die Verwendung eine Bilds in der ersten Suche, das dem Referenzbild besser entspricht, wird die fälschliche Erkennung eines ähnlichen Bilds vermieden.

Wie man stabile Suchergebnisse sicherstellt (Verbesserung der Ergebnisgenauigkeit)
Die meisten Suchfehler können mithilfe der unter „Wie man Fehler bei der Suche wirksam verhindert“ beschriebenen Maßnahmen vermieden werden. Aber gelegentlich kommt bei der Suche noch ein weiterer Faktor ins Spiel: Genauigkeit. Hier geht es darum, mögliche Wertschwankungen auszugleichen. Bezogen auf den oben beschriebenen Algorithmus versteht man unter Genauigkeit den Präzisionsgrad, der im abschließenden Prozess erreicht werden kann. Im folgenden Abschnitt werden Methoden beschrieben, mit denen sich die Genauigkeit der Endergebnisse verbessern lässt.
Wie kann man die Genauigkeit der Ergebnisse wirksam erhöhen?
- Mehrfaches Durchlaufen des abschließenden Prozesses (Feinsuche)
- Arbeiten im kontinuierlichen Erfassungsmodus
- Verwenden von Bildaufbereitungsfiltern
(1)Mehrfaches Durchlaufen des abschließenden Prozesses (Feinsuche).
Neben der Erhöhung der Suchempfindlichkeit durch Anpassen der Komprimierungsrate, die für die erste Suche im Abschnitt „Gründe für Fehler bei der Suche“ beschrieben wurde, gibt es noch einen weiteren Parameter: die Suchgenauigkeit. Über ihn wird von „Grob“ bis „Fein“ in fünf Stufen die Anzahl der Wiederholungen für den Suchvorgang festgelegt.
Um präzisere Messergebnisse zu erhalten, wählen Sie eine feinere Suchgenauigkeit, um die Zahl der Durchläufe für die zweite und die abschließende Suche zu erhöhen. Das Endergebnis wird dadurch präziser.

(2) Arbeiten im kontinuierlichen Erfassungsmodus.
Bei der kontinuierlichen Erfassung wird jedes getriggerte Bild mehrfach aufgenommen und verarbeitet, wobei die Durchschnitts-, Maximal- und Minimalwerte der Ergebnisse ermittelt werden. So lassen sich im Vergleich zur Einzelerfassung Schwankungen bei den Messwerten kompensieren.
Suche der nächsten Generation: Geometriesuche
Zusätzlich zur Mustersuche, die auf der normalisierten Korrelationsmethode basiert, gibt es noch die Geometriesuche, bei der Profilangaben zugrunde gelegt werden. Zu diesem Zweck verfügt die Modellreihe CV von KEYENCE über ShapeTrax2.
Da ShapeTrax2 auf Profilangaben basiert, sind präzise Suchen anhand der verbleibenden Formdaten auch dann noch möglich, wenn ein Teil des Messobjekts fehlt. Mit dieser Funktion lassen sich daher auch Größenschwankungen oder Schwarz/Weiß-Umkehrungen an Messobjekten auflösen. Die Erkennung bleibt unabhängig vom geänderten Zustand der Oberflächenbehandlung stabil.
Positionierung der Laminierung von Glassubstraten
Die Erkennung bleibt auch dann noch stabil, wenn der Rahmen die Markierung überdeckt und sich die Form der Markierung verändert.

Fälle, bei denen die herkömmliche Mustersuche an ihre Grenzen stößt
-
[Teilweise fehlendes Muster (verdeckt)]

-
[Größen-/Fokusschwankung]
-
[Schwarz/Weiß-Umkehrung (Negativ)]


Lösung mit ShapeTrax2
-
[Teilweise fehlendes Muster (verdeckt)]
-
[Größen-/Fokusschwankung]
-
[Schwarz/Weiß-Umkehrung (Negativ)]



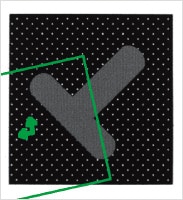
Erkennung mithilfe von ShapeTrax2
-
Suche anhand einer extrahierten Kantenform

Kantendaten im Referenzbild -
Suche nach einer ähnlichen Kantenform im aufgenommenen Bild

Die Positionsmessung im Überblick (Suchmodus)
Denken Sie an die folgenden Punkte, um sichere Suchen mithilfe eines Bildverarbeitungssystems zu gewährleisten.
- Fundierte Kenntnis des Funktionsprinzips der Sucherkennung hilft bei der Auswahl des am besten geeigneten Modus und der detaillierten Einstellungen.
- Eine Anpassung der Suchempfindlichkeit ist sinnvoll, wenn die Suchkriterien vom Messobjekt abweichen.
- Durch Anpassen der Suchgenauigkeit lässt sich das Endergebnis präzisieren.
- Bei der Geometriesuche werden über weitere Profilangaben Zustand und Form des Messobjekts bei der Suche berücksichtigt.
Im nächsten Thema geht es um eine Methode auf Basis der Positionskorrektur, mit der auch bewegte Objekte zuverlässig geprüft werden können.
Die Positionskorrektur-Funktion ist erforderlich, um Objekte zu prüfen, während sie die Produktionslinie durchlaufen.
Wesentliche Punkte zum Verständnis der Positionskorrektur: Prüfung von Korrekturquelle und -ziel, Koordinatenachsen und Drehwinkel. Diese Punkte werden im Folgenden näher beschrieben.

![Technikgeschichte Der Bildverarbeitung Band 1 [Kamera]](/img/asset/AS_63138_L.jpg)
![Die neuesten Anwendungsbeispiele aus der Bildverarbeitung [Automotive]](/img/asset/AS_72922_L.jpg)

![Die neuesten Prüfungen mithilfe Bildverarbeitung [Lebensmittelindustrie und Pharmaindustrie]](/img/asset/AS_73109_L.jpg)
![Die neuesten Prüfungen mithilfe Bildverarbeitung [Elektronikbauteile & Elektronikgeräte]](/img/asset/AS_87575_L.jpg)