Erkennung basiert auf „Lichtmenge“
Merkmale von Farbsensoren
Ein Farbsensor ist ein photoelektrischer Sensor, der anhand eines Senders einen Lichtstrahl ausgibt und dann anhand eines Empfängers das Licht auswertet, das vom Erkennungsobjekt zurück-reflektiert wird.
Ein Farbsensor kann die empfangene Lichtintensität/Farbwerte für rot, grün und blau auswerten, was die Bestimmung der Farbe des Messobjekts ermöglicht.
In diesem Abschnitt werden die Merkmale von Farbsensoren erläutert.

Merkmale
Stabile Erkennung von Unterschieden in Farbe und Optik
Da die Lichtquelle nicht einfach rot ist, sondern rote, grüne und blaue Wellenlängen enthält und das Verhältnis dieser Wellenlängen berechnet werden kann, können Optik und Farbe der Messobjekte unterschieden werden.
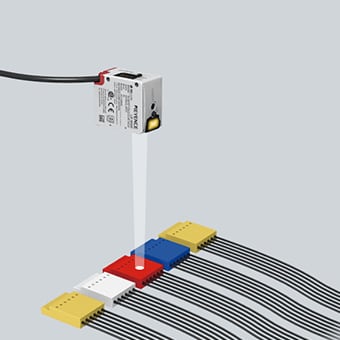
Bei der Verwendung eines photoelektrischen Sensors mit roter Wellenlänge sind einige Farbkombinationen wie rot und weiß schwer zu unterscheiden. Ein Farbsensor ermöglicht selbst bei diesen schwierigen Kombinationen eine stabile Erkennung.
Hinweis: Reflexionsverhältnis der einzelnen Farben bei rotem Licht
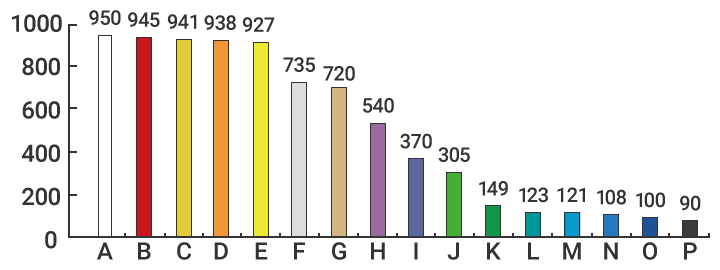
* Der Graph zeigt Unterschiede in der Intensität des Lichts, das von verschiedenfarbigen Objekten empfangen wird, wenn ein Lichtleitersensor (rotes Licht) von KEYENCE verwendet wird. Es zeigt, dass Kombinationen wie weiß und rot oder orange und gelb schwierig zu unterscheiden sind, wenn lediglich die empfangene Lichtintensität betrachtet wird.
Stabile Erkennung selbst bei veränderlichem Abstand
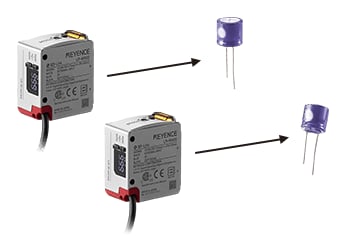
Bei Vorgängermodellen photoelektrischer Sensoren verändert sich mit dem Abstand zum Messobjekt auch die empfangene Lichtintensität. Im Gegensatz dazu, verändert sich bei einem Farbsensor die Farberkennung auch dann nicht, wenn sich der Abstand zum Messobjekt ändert. Folglich kann die Farbe des Messobjekts stabil erkannt werden, selbst wenn sich der Abstand ändert oder das Messobjekt eine Neigung aufweist.
Wenn sich der Abstand zu einem Messobjekt ändert, wirkt sich das folgendermaßen auf photoelektrische Sensoren (empfangene Lichtintensität) und Farbsensoren (Verhältnis des empfangenen Lichts) aus:
Empfangene Lichtintensität
Ändert sich der Abstand zum Messobjekt, ändert sich auch die empfangene Lichtintensität.
Beispiel: Vibrationen einer Förderanlage. Variationen der Durchlaufposition des Messobjekts.


Veränderungen der empfangenen Lichtintensität
Links: Empfangene Lichtintensität 30
Rechts: Empfangene Lichtintensität 100
Verhältnis des empfangenen Lichts
Selbst bei verändertem Abstand zum Messobjekt ändert sich das Farbverhältnis nicht.


Keine Veränderung des Verhältnisses des empfangenen Lichts
Links: Verhältnis des empfangenen Lichts 4:4:1
Rechts: Verhältnis des empfangenen Lichts 4:4:1

-
Erkennung basiert auf „Lichtmenge“
Was ist ein Farbsensor?
Farbsensoren -
Erkennung basiert auf „Wirbelströmen“
Was ist ein Induktiver Sensor?
Induktive Sensoren / Näherungsgeber










